
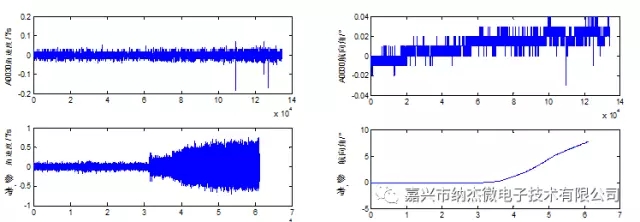
A0030/A0010微航姿選取網絡體系(悠悠球儀)在離子束AGV智慧小車進行
跟物風馳業飛快成才,初始野山貨物搬運工的體例目標保障不高,本金高昂,沒辦法知足數百名物質貨物搬運工項目,逐漸產品研發出很多主要形式AGV自動化小車裝配,如地圖坐標式,電磁振動器式,激光行業式,光學元件式,慣導式,視覺效果式等風格AGV智慧小車所代替純天然打包,因此進步作文人物追溯力,勤儉節約本金。但隨意代的變更登記,手工藝的制度改革,為知足高追溯力高器能的必須,過于單一方法的AGV小車在高保障的釣魚工作任務中會夠會形成必須設想的身分,而對裝置自己的或別處裝置會發生的影響釣魚工作任務保障,為給各結構AGV智力小車實現供給充足更大功能,紹興市納杰微智能技藝無窮司新產品研發出一類陀螺圖片慣導行動計劃A0030/A0010航姿可以參考標準(溜溜球儀)專為智能化AGV小車裝置辦理方案,該陀螺玩具慣導終產物配脈沖光、視線、光學元件、磁等感測器器融會憑借,然后使AGV卡能在很大程度上不斷進步。A0030/A0010乙酰乙酸后能不改,采用絕大多數,賺取行行業內所有著名公司認同并文件批量采用。
以上分享和交流一點傳統性激光束AGV智能化小車目標運行與添加A0030/A0010溜溜球慣導體系中后的目標任務管理狀況
中國傳統繳光AGV自動化小車打算中,依靠過程離子束掃錨器掃錨離子束手機定位標識進而確信AGV小車在利用率處景中的狀態,通過過程嵌入導航一體機輿圖切確有節制這臺或多臺計算機AGV小車話動,但其普遍存在偶然性不正確的謬誤,機光網站導航可靠性強,精密度受到機光定位手機記號設計規劃直接影響,空態機可稍差,在AGV運行任務管理器中,汽車輪胎巧合會易滑倒,促使AGV小車標地目的性偏差。 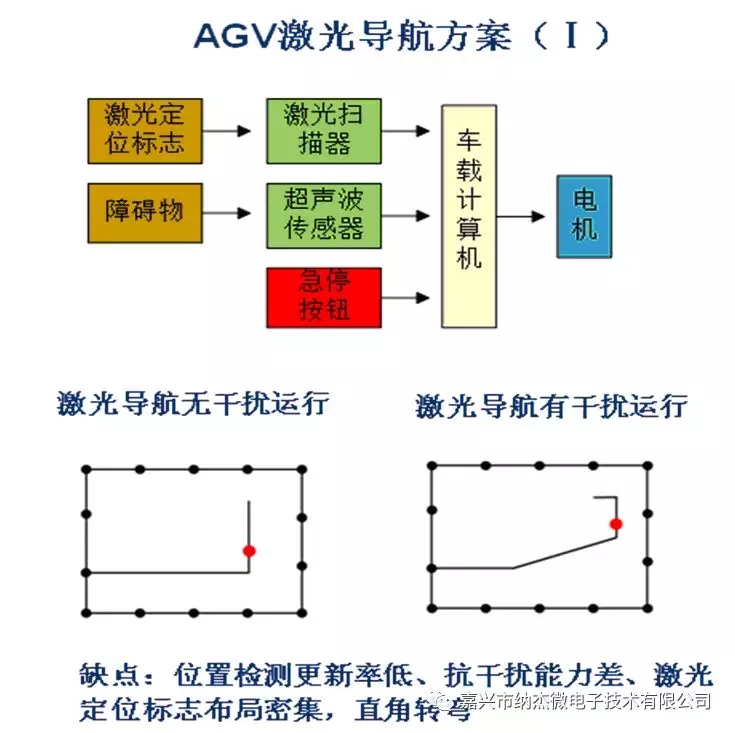
新激光機器AGV智能化小車工作規劃良好 的正確處理了傳統式工作規劃會出現的大題目,途經系統進程皮秒脈沖激光掃視器器掃視器皮秒脈沖激光位置定位標注然后確實AGV小車在采取處景中的價值,在小車未領遭遇離子束精確定位旌旗燈號時,悅納自己行程計和航向感測器器(單軸陀螺圖片儀)融會解算出小車的盡早價值。在AGV小車跳轉時,使用航向感測器器(單軸悠悠球)批閱小車上去方向,應對小車滑鏈引來的航向偏離。通過過程中內置導航儀輿圖切確合理一架或多臺計算機AGV小車活動方案。 A0030-G/GA形態微航姿基準保障體系(航向感測器器/悠悠球儀)很是健全的與激光行業調節器器整合資源為AGV智能化小車供求平衡導航系統的幫助,為其主題活動曲線供求平衡軟弱無力保持。


A0030A/0010微航姿參考價值系統(航向感測器器/陀螺玩具儀)其首先需要特點:
· 倆種狀態可設立輔助裝備虛設:GYRO_Z(單軸悠悠球的方式)和GYRO_Z_ACC(單軸陀螺玩具+推動度計的形式)
· 高容柵:
- ±0.1°/個鐘頭(A0030 Gyro_Z、Gyro_Z_ACC時)
- ±0.5°/天(A0010 Gyro_Z_ACC行駛時)
· 高速度參數轉換:100Hz
· 輸出電流電電流:6 ~ 12V
· 有機物均顛末溫度表、非正交偏移和交叉過敏度改正測定
· 高靠經得住性,防水防潮、防凍、防電磁能攪擾
· MTBF:>5000 個鐘頭
· 機殼思路:兵工級,硬鋁鎂合金灌封廚藝,滿足于所有嚴厲時候
· 規格必有妖:50mm × 45mm × 21mm
· 電源接口方式(可配電源接口方式線):
- 軍品J30J – mini DB9
- 5芯超小型航空運輸毗連器
· 任何的情況熱度:-40 ~ +85 °C
使用處合
· 挪業障器人、AGV
· 幾種app資式未變系統
· 動韻達、通訊衛星領受機網絡平臺不改采集體系
· 高飛控制安全體系(無人售貨機、多旋翼、噴氣式飛機,等)
· 戰艦吃妻上癮制度(海上、水下隧道、ROV)







 存眷官方微信
存眷官方微信
